“小猎豹”软体机器人:机器人内部的两个执行器模拟脊柱
2022-09-20 19:21:11 作者:浅末年代Ω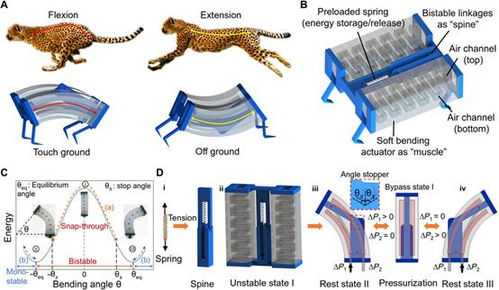
猎豹是陆地上奔跑速度最快的生物,它们通过背部强健的肌肉控制脊柱的弯曲和伸展,来实现高速奔跑,追捕急支糖浆或是其他猎物。受猎豹的启发,在发表于《科学·进展》的一篇论文中,研究团队开发出一种新型的软体机器人。相比前几代,这种新型的软体机器人跑得更快,还能巧妙地抓取物体。
两个执行器中交替抽气,让“小猎豹”的“控制脊柱的肌肉”在收缩和伸长的两种状态下交替变换。(来源:Tang et al。, 2020)
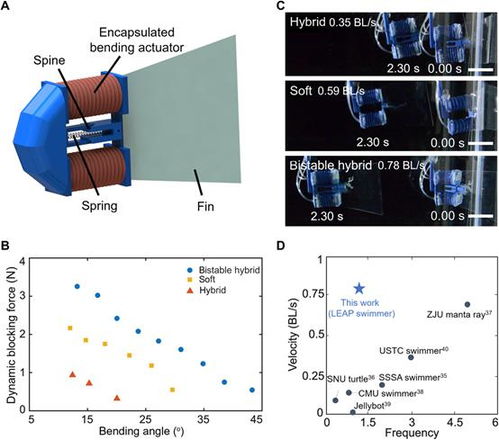
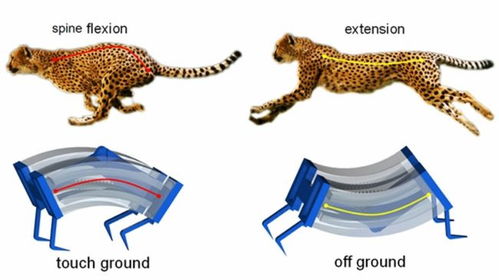
这些“小猎豹”软体机器人长约7厘米,重约45克,由两个软性气动执行器和一个弹性弹簧驱动的机械脊柱组成,拥有“双稳态”脊柱结构。猎豹机器人奔跑时,躯体会在脊背弯曲、四肢收缩交错的蹬地状态,与脊背伸展、四肢伸长的腾空状态之间变换,在蹬地或腾空至极限时,气动执行器和弹簧的能量总和均处于最低点,因此称作“双稳态”。机器人内部的两个执行器模拟脊柱,在充气时能够分别向上和向下弯曲。通过空气泵交替弹开,实现机器人正弓蹬地和反弓腾空的形态转换。这样的设计赋予了机器人“蹬地”的力量,从而在地面上跃进。
“小猎豹”能够蹬地并跃进,这使得它(上)的速度比其他软体机器人快出很多。
研究人员指出,以往的软体机器人只能在地面爬行,这限制了它们的速度。此前,软体机器人的最快速度是每秒移动0.8个体长。新一代的软性机器人能够在大约3Hz的低驱动频率下,达到每秒2.7个体长(约187.5mm/s)的速度——是此前最快速度的3倍多。
“小猎豹”(左和上)在斜坡和水中的表现也比其他软体机器人好。
除此之外,这些新机器人甚至还能在陡峭的斜坡上奔跑,在水中快速游泳。研究人员希望,这些“小猎豹”未来能够帮助搜索和救援,以及应用于工业生产中。
这种新型软体机器人还可以协同完成抓取作业。