嫦娥五号完成了样品在轨转移(嫦娥五号完成了样品在轨转移观后感)

嫦娥五号完成了样品在轨转移
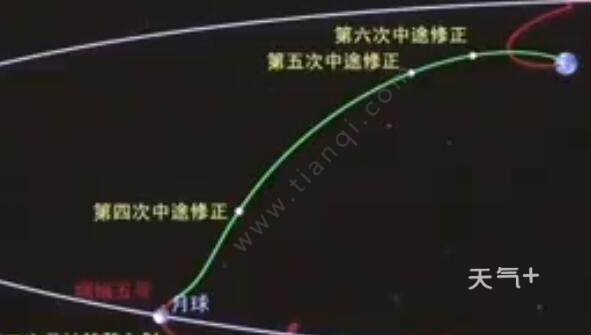
记者从国家航天局获悉,嫦娥五号上升器于北京时间12月6日5时42分成功与轨道器和返回器组合对接,6时12分将样品容器安全转移到返回器。
这是中国第一次实现月球轨道交会对接。
轨道器逐渐接近上升器。(国家航天局供图)
从上升器进入环月飞行轨道开始,轨道器和返回器组合体通过远程引导和近程独立控制逐渐靠近上升器,抓住上升器,完成交易对接。
随后,嫦娥五号轨道器和返回器的组合将与上升器分离,并选择返回地球的机会。
轨道器与上升器完成交易对接。(国家航天局供图)
那么38万公里外的深情拥抱是如何完成的呢?
世界首创对接机构设计理念
嫦娥五号采用的对接方式与中国载人航天任务交会对接有很大不同。
载人航天使用的对接机构学名为异体同构周边对接机构,对接后可形成80cm左右的通道,方便宇航员穿越。月球探测严格限制了探测器的质量和空间。嫦娥五号对接机构必须小而精细,重量应降至周边对接机构的15分之一,并具有样品容器捕获和自动转移功能。
据中国航天科技集团八院嫦娥五号探测器副总指挥张玉华介绍,开发团队在嫦娥五号用爪对接机构,通过增加连杆爪转移机构,实现对接与自动转移功能的集成。这些设计概念是世界上第一个。
嫦娥五号轨道器技术副总负责人胡振宇介绍,该对接机构由三套k型爪组成。“所谓抱爪,就像我们手里拿着棍子的动作一样,两个方向一用力,就能把棍子牢牢地握在手里。”他说,当上升器靠近时,只要对准连接面上的三个连杆,收紧爪子,就可以实现两个装置的紧密连接。
捕获、关闭和转移的过程似乎很简单,但在38万公里外的高速飞机上并不那么容易。
“与地球轨道相比,月球轨道有时延,时间走廊较小,对时效性要求很高,对接和转移任务必须一次完成。”对接机构和样品转移分系统技术负责人刘仲表示,整个对接步骤应在21秒内完成,1秒捕获,10秒校正,10秒锁定。为此,研发团队制定了35个故障计划,从启动到交会对接,都是自动控制的。
他们还建立了四个测试系统:整机特性测试台、性能测试台、综合测试台和热真空测试台,进行了661次对接测试和518次样品转移测试。刘忠说,研究人员甚至故意在测试中添加小故障,以便对接机构能够自动识别和排除故障,以确保自动对接和样品转移过程是安全的。
从百公里外牵线搭桥
在实现完美的对接之前,首先要让轨道器和升降机靠近对方。嫦娥五号交会对接微波雷达,中国航天科技集团第二研究院25研制,是中远距离测量的唯一手段“牵线搭桥”。
记者从25所了解到,雷达是由雷达主机和响应机组成的一对产品,分别安装在嫦娥五号轨道器和升降机上。当两者相距约100公里时,雷达开始工作,不断为导航控制系统提供两者之间的相对运动参数,并进行双向通信。两者根据雷达提供的信号调整飞行姿势,直到对接机构被捕获和锁定。
据微波雷达总工程师孙武介绍,在介绍,在我国载人航天工程任务中,航天器在近地轨道上进行了多次交会对接,使用了25种微波雷达。不同的是,这次交接的是38万公里外的月球轨道,难度更大。与近地轨道相比,月球轨道没有卫星导航等服务资源,微波通信是中远距离测量的唯一手段。同时月轨环境更复杂,要克服月球引力影响,因此自动交会对接对微波雷达提出的要求极为苛刻。
为此,25项攻克了大宽角度测量等关键技术。
这次交易体积差异很大“大追小”对于复杂的应力过程,采用爪式弱冲击对接机构,微波雷达的测角精度较高。“我们采用创新的误差补偿算法,将微波雷达的测角精度从0开始.15°提高到了0.1°。”微波雷达项目主任设计师何中琴说,提高精度的提高,当对接双方距离20米时,上升对接机构的爪锁定面从5厘米缩小到3厘米。这2厘米的差异大大提高了准确对接的胜算。
此外,升降机不可避免地可避免地会形成灰尘,这可能会干扰对接应答机,降低角度测量精度。为此,设计师在应答机上安装了由特殊材料制成的防尘罩,就像在千里眼上戴护目镜一样,以避免这种隐患。
拒绝样品转移“卡壳”
轨道器与上升器对接后,上升器上装有月壤的样品容器应转移到返回器上。
胡振宇介绍,该步骤中使用的连杆棘爪转移机构采用了非常巧妙的设计。它使用两套倒三角形棘爪,使容器通过四次伸缩逐渐移动到返回器。
航天科技集团八院149厂对接与样品转移机构总装团队,为实现样品顺利转移,付出了艰巨的努力。
据149厂副总经理陆海滨介绍,对接环的运动位置精度和中性是影响月球样品转移成败的关键因素之一。对接样品转移机构是一种体积小、结构复杂的弱刚性结构,但功能相同,对装配中的测量数量和精度要求较高。
在转移过程中,对接机构和样品转移子系统形成了一条封闭的微型隧道,受产品特性的六个自由限制。在开发过程中,团队主要操作员吴军和顾京海发现,该系统的运行在理论和实践上存在偏差。由于六种自由限制,由于外部压力,弱刚性结构容易产生细微的变形,不能满足5微米的水平精度要求。
“限制产品的品在转移过程中的结构约束,限制了产品的六种自由度。然而,在实验中,出现了‘卡壳’现象。”吴骏说。
他们仔细分析了传输的运动轨迹和路径,并提出了将限制降低到左右和旋转两个自由度的方案。因此,他们将圆孔的限制装置改为“方孔 扁平轴”,经过不断的修改和改进,每个指令和行动都可以在转移机构的运行过程中顺利完成,每个位置的精度误差不超过5微米。
完美记录“拥抱”全过程
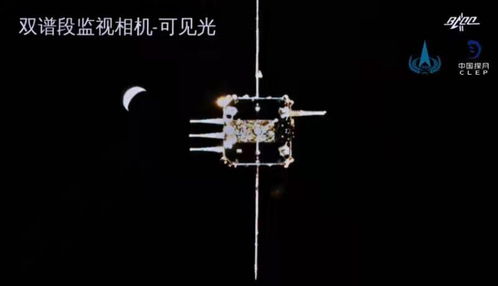
交会对接过程发生在38万公里外,被航天科技集团第八研究所控制的红外和可见光双谱监控摄像头记录下来,完美呈现给数百万人关注“嫦娥”的人们。
与以往任务中使用的监控相机不同,嫦娥五号配备了红外和可见光成像的双谱监控相机。红外和可见光传感器通过各自的光学镜头获取图像数据,并根据遥控指令在六种拍摄模式中自由切换,实现红外和可见光分别或同时成像。
控制研究所光学导航专家郑循江表示,该相机相当于在普通相机上添加夜视仪。即使交会对接过程发生在月背,无法接受阳光,也可以通过红外相机记录下来。如果有光,如果光太强,可见光相机拍摄的照片可能会过度曝光。这款双谱相机可以保证交会对接过程全天记录。
为了观众呈现高清画质,相机可见光谱段分辨率达到2048年×2048年;非制冷长红外波段用于红外谱段,分辨率为640×480。但要实现红外和可见光同时成像,数据量巨大,开发初期产品始终不能满足任务要求的帧频。优化项目团队DSP提高软件运行效率的软件架构和算法。
在满足了清晰度和帧频率的要求后,数据传输已经成为一个大问题。就像一条单行道要承载双倍的交通流量一样,拥堵是不可避免的。产品主管设计师王峰表示,为了避免这种情况,我们必须努力从图像和视频压缩技术开始。
经过多次尝试,项目团队最终选择了先插值再压缩的方式,采用不同的压缩算法,利用帧间相关性提高图像质量,最后将压缩数据下传到地面减压恢复。
大量的数据处理,使组件的选择也相当困难。航天器件可靠性高,但运行速度相对较低,不能满足任务需要。经综合考虑,项目团队选择了工业高性能8核处理器,提高数据处理速度,制定了《低级组件保修方案》,开展了抗总剂量辐照、热环境、机械环境、静电放电等专项试验,确保产品的可靠性。